
It seems that when a many legged animal walks, and when a legless animal slithers along, the mechanics involved in the two processes are not all that different. Well this is what scientists from UC San Diego have proposed after conducting research into walking movements by ants and robots. The team of roboticists, physicists and biologists have published their findings in the Proceedings of the National Academy of Sciences, in a paper titled “Walking is like slithering: a unifying, data-driven view of locomotion.”
In previous research, the scientists had studied the mechanics of walking in ants, and they thought their findings could be applied to designing algorithms for walking in robots. They conducted research on several colonies of Argentine ants at UC, San Diego, and on two different types of multi-legged robots at the University of Michigan. While conducting this research, they discovered a new mathematical relationship between walking, skipping, slithering and swimming in viscous fluids, for multi-legged animals and bots.
“This is important because it will allow roboticists to build much simpler models to describe the way robots walk and move through the world,” said study co-author Nick Gravish, a faculty member in the Department of Mechanical and Aerospace Engineering at the University of California San Diego.
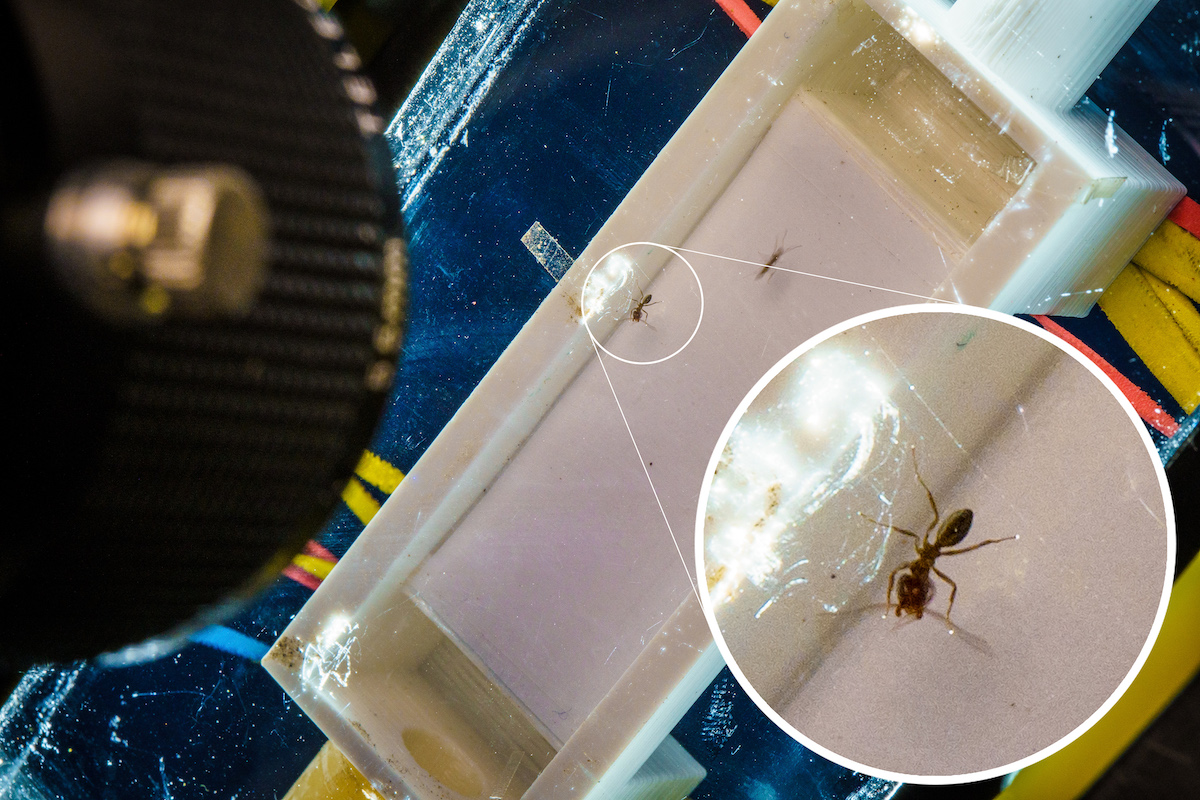
Argentine ants are good subjects to study because they walk long distances over diverse terrains. “Argentine ants are very easy to study in the lab,” said Glenna Clifton, a faculty member at the University of Portland, who conducted most of the ant research while she was a postdoctoral scholar in Gravish’s lab at UC San Diego.
These ants also adapt to laboratory settings easily, and will rapidly reconstruct their colony once transferred into the lab. Researchers then motivate them to walk by placing food in specific locations, and monitor their movements using video recordings. “These ants will set up foraging trails and follow them,” Clifton said. “They bounce back quickly and they don’t hold a grudge.”
To study locomotion in these animals and robots, researchers used an algorithm developed by the research group of Shai Revzen at the University of Michigan, which turns complex body motions into shapes. “This algorithm allows us to create a simple relationship between what posture you’re in and where you are going to move next,” Gravish said.
The researchers found that the same algorithms could be applied both to ants and to the different types of robots in the study, even though different numbers of legs were sometimes involved. And the amount of slipping motion was also very different when the animal and robot subjects were walking. Argentine ants don’t slip much when they walk – just 4.7 percent of total motion. By contrast, slipping occurred in 12 to 22 percent of the motion in the six-legged BigANT robot and 40 to 100 percent in the multipod robots with six to 12 legs in the study.
By using a model based on the above-mentioned algorithms, the experts could predict where the insect or robot was going to move next simply based on what posture – or shape – it is making with its body. “This provides a universal model for location that applies whenever the movement is dominated by friction with the environment,” wrote the researchers.
The mathematics that the researchers used isn’t new, but it was understood to only apply to slithering and swimming movements in viscous liquids. The team showed that the same equations apply to multi-legged walking, whether the walkers are slipping or not. In addition, the same rules apply from millimeter-scale insects, such as ants, to meter-scale robots.
“The universality of this approach may have applications in robot design and motion planning, and provides insight into the evolution and control of legged locomotion,” wrote the researchers.
For example, these universal principles may have implications for understanding major evolutionary transitions, for example from swimming to walking, say the authors. Given that walking, even with slipping, follows the same general control principles as viscous swimming, early land animals might already have had the neural circuitry needed for locomotion on land.
The team did not study locomotion in two-legged animals or robots, but the model would apply equally to these, provided that they move slowly, have both feet on the ground at the same time, and do not fall over. The researchers have more fine-tuning to do in order to understand other factors, such as the role friction forces play in the model.
Astronomers detect first direct image of black hole expelling a powerful jet

Artificial Intelligence Discovers Hidden Giant, a Planet 5 Times Larger Than Jupiter

Scientists explain melting of Antarctic ice sheet dating back 9,000 years

An Unexpected Discovery: Hubble, ESA's Gaia Spot Double Quasar That Existed Over 10 Billion Years Ago
Astronomers detect first direct image of black hole expelling a powerful jet

WhatsApp rolling out ‘reply with message’ feature within call notifications

Multi-Device Pairing May Be Arriving for Apple Watch this Year